OpenLayers 3 之 实时追踪轨迹-获取最后添加的要素
目录
问题描述
有时,往往有这样的需求:每隔一段时间查询一个物体的位置,然后将这个位置绘制在地图上,中间的点用普通的样式标识,当前位置(也就是最新的点位置)使用一个特殊的样式。我们可以这样实现,查询到一个新位置,将改点添加到地图上的同时,赋予其特殊的样式,当再查询到有新的位置时,获取最后添加的要素,删除其特殊样式,然后添加新的要素点位置。
那么,问题来了:怎么获取最后添加的要素呢?
方法一: getFeatures
首先,我们知道,ol.source.Vector,提供了 getFeatures 方法,该方法获取图层中的所有要素,并返回其组成的数组,其定义如下:
ol.source.Vector.prototype.getFeatures = function() {
var features;
if (this.featuresCollection_) {
features = this.featuresCollection_.getArray();
} else if (this.featuresRtree_) {
features = this.featuresRtree_.getAll();
if (!goog.object.isEmpty(this.nullGeometryFeatures_)) {
goog.array.extend(
features, goog.object.getValues(this.nullGeometryFeatures_));
}
}
goog.asserts.assert(features !== undefined,
'Neither featuresRtree_ nor featuresCollection_ are available');
return features;
};函数首先检查 featuresCollection_ 是否为空,如果不为空,那么调用其 getArray 方法,featuresCollection_ 是一个 ol.Collection 对象,是 openlayers 对 javascript 的 Array 的进一步封装,其 getArray 方法就是返回对象内含的数组,数组中便包含着图层包含的所有要素;如果 featureCollection_ 为空,则进一步检查 featuresRtree_ 是否为空,如果不为空,则获取其中的所有要素,并获取 nullGeometryFeatures_ 中的所有要素,然后合并两个数组,返回;最后,如果都没有要素,那么就报错:“featuresRtree_ 和 featuresCollection_ 中都没有要素”,如果有要素,返回。
那么 featuresCollection_ 和 featuresRtree_ 是什么结构呢?下面我们一一说明。
1.1 featuresCollection_
featuresCollection_ 是内含要素集合的 ol.Collection 对象,除非是 source 对象的 useSpatialIndex 设置为 false,或者其 features 属性设置为 ol.Collection 的要素集合,否则 featuresCollection_ 的值将是 null。
所以如果不是以上的配置,那么往往 getFeatures 方法是获取的 featuresRtree_ 中包含的要素集合。
1.2 featuresRtree_
featuresRtree_ 在 ol.source.Vector 其定义如下:
/**
* @private
* @type {ol.structs.RBush.<ol.Feature>}
*/
this.featuresRtree_ = useSpatialIndex ? new ol.structs.RBush() : null; 类初始化时,首先检查 useSpatialIndex (其默认值为 true),如果是 true,那么将其初始化为 ol.structs.RBush 对象类型,否则为 null。那么这个 ol.structs.RBush 是什么类型呢?
ol.structs.RBush 是 openlayers 对 RBush 的再次封装,RBush 是一个用于点和矩形的 2D 空间索引算法的高性能 javascript 实现,其基于优化的 R-tree 数据结构,支持批量插入。不了解GIS的可能对“空间索引”不是很了解,“空间索引”其实是一个特殊的数据结构,主要针对数据类型是点或者矩形,“空间索引”可以让你高效的执行将查询条件限定为一个矩形区域的查询,即“空间查询”,比循环检索所有条目有‘几百倍’的提升!“空间索引”普遍用于地图和数据可视化。
我们从上面 getFeatures 的源码可以看到,其使用了 ol.structs.Rbush 的 getAll 方法,其 getAll 方法调用了 RBush 的 all( ) 方法,但是这个返回所有数据的方法,并不能保证其按照插入数据的顺序,这也很容易理解,我们来看 R-tree 在内存中的情况:
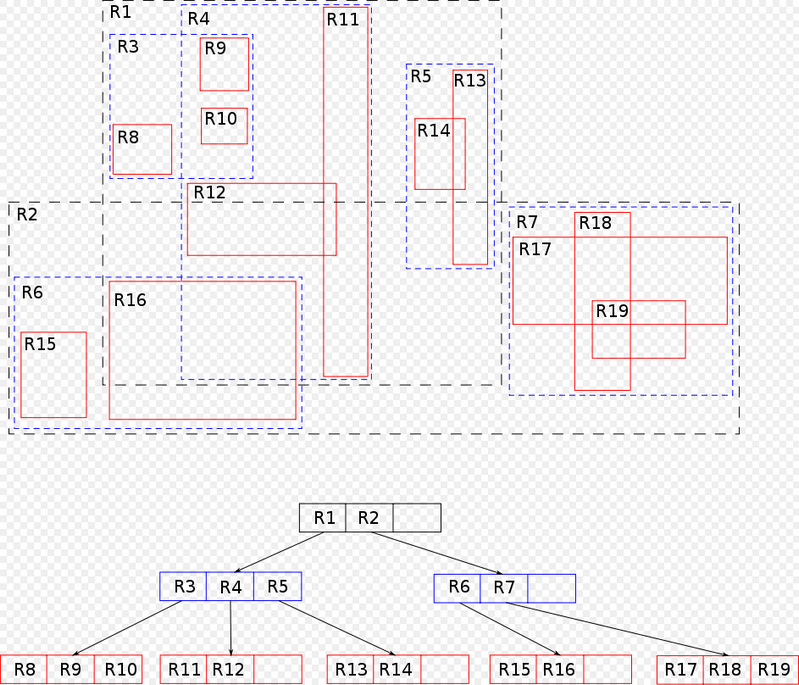
图1 R-tree在内存中的情况
从图中可以看出,当插入一条数据,这条数据会被添加到其被包含的矩形区域中,但是并没有记录其插入时候的序号,所以当取出所有节点时,就并不能保证按照插入的顺序。
所以我们并不能写出如下的代码,期待‘总是’得到“最后添加的要素”,之所以说‘总是’是因为,有时候可以得到,但并不稳定,我测试是,当超过10后就会出错:
var features = veclayer.getSource().getFeatures();
var feature_num = features.length;
var last_feature = features[feature_num-1];方法二:getFeatureById
那么有没有其他的方法获得最后插入的要素呢?
ol.source.Vector 还提供了一个方法:getFeatureById,我们可以通过要素的 id 来获取它,前提是你给要素设置了 id,通过 feature.setId(id) 设置,正如开篇提到的需求,在程序自动获取的情况下,我们可以设置一个计数器,每次添加要素就将计数器的值自增 1,然后将计数器的值设置为相应添加的要素的id,当获取到新的点位置时,通过计数器获取最后添加的要素,将其样式设置为普通样式即可。
总结
本文主要讲了实时轨迹追踪问题的获取最后添加的要素的方法,并讨论了 ol.source.Vector 方法获取的要素为什么是没有规则的顺序的原因。
另外, RBush 的作者是 Vladimir Agafonkin,其项目位置在这里,感兴趣的可以看看: https://github.com/mourner/rbush 。
好的,就写到这里,有什么问题,可以在文章下面留言或者给我发邮件。
转载自:https://blog.csdn.net/qingyafan/article/details/50478360