用于可扩展森林库存的激光雷达技术
目录
迫切需要快速、严格、可重复和可扩展的森林清查工具,以支持数据驱动的政策和管理实践,以应对包括森林砍伐和气候变化在内的挑战。激光雷达技术为各种规模的自动森林清查提供了一种替代方案,但每个平台在成本、效率、覆盖范围、分辨率等方面都有权衡。那么解决方案是什么?
森林是全球占主导地位的生态系统,覆盖了地球陆地面积的近40%。它们提供关键服务,如纤维、木材、燃料、二氧化碳去除、供水过滤、洪水侵蚀控制、娱乐和生物多样性维持。然而,他们不断受到各种压力源的挑战。随着人口的持续增长,森林砍伐活动正在增加,以满足物质、农业用地和城市发展的需求。气候变化加剧加剧了这种压力因素。联合国经济和社会事务部在其《2021年全球森林目标报告》中提出了这些挑战,需要立即予以关注。本报告为确保全球森林可持续性设定了六项目标。有人强调,实现这些目标需要数据驱动的政策和管理做法,并以准确/全面的清单为动力。
正确管理的基本森林数据示例包括树木数量、树种、健康状况、高度、茎粗、直线度、锥度影响、分枝数量和分枝顺序/角度。这些信息对于预测木材产量、木材价值和碳固存率至关重要。传统上,此类性状的清单是手动进行的,这既昂贵又耗时。例如,美国森林清查和分析(FIA)计划每年花费近100亿美元来清查18,000英亩,仅相当于美国森林总面积的0.002%。除美国和欧盟外,全球几乎不存在森林清查计划。因此,迫切需要快速、严格、可重复和可扩展的库存工具。
随着传感器和算法技术的进步,远程/近近/近端传感——包括太空/飞行器上的成像和激光雷达系统、固定式地面激光扫描仪(TLS)和地面移动激光雷达——最近被探索为各种规模的自动森林清查的替代方案。这些传感器/平台在成本、现场调查效率、空间覆盖范围、空间分辨率和所获取信息的详细程度方面进行了权衡。图1显示了用于精细森林清查的潜在数据采集系统(近端和近端)的两个示例。

空间图像和机载激光雷达
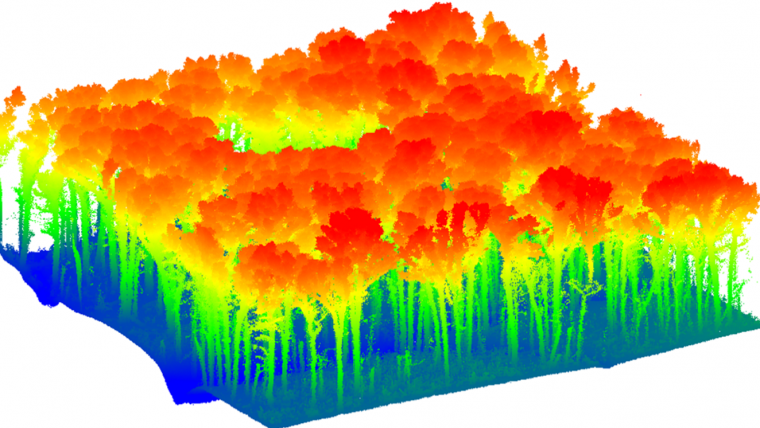
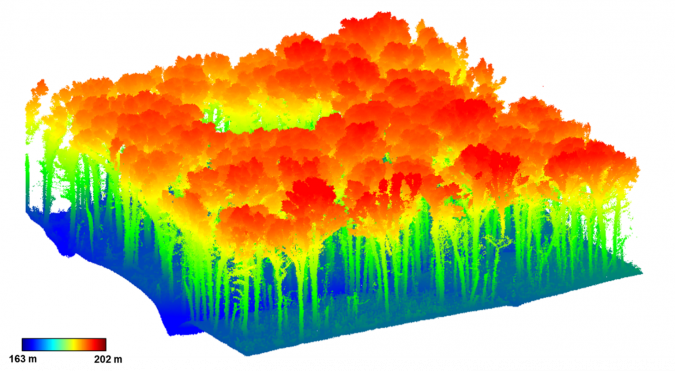
空间图像和激光雷达数据有助于全球和国家森林清查。然而,有限的空间和时间分辨率不允许在单个树木一级进行精细的清查。对星载和载人航空系统采集的图像进行摄影测量处理,引起了林业研究界对树木高度、茎体积和基部面积等库存属性的估计的关注。然而,基于图像的点云生成面临挑战,因为在落叶和落叶条件下,难以确定森林景观重叠图像中的相应点。此外,从影像中得出的点云仅捕获森林冠层的外围。机载激光雷达提供较大的空间覆盖范围、精细的分辨率以及表示外壳和冠层下结构的能力。激光雷达能量可以穿过树木/树叶之间的缝隙,并从树干和地形中获得回报,从而促进了较低的树冠测绘。这种能力使激光雷达成为推导地面坡度和坡向、茎图、冠层高度、冠幅尺寸和叶面积指数(LAI)的有吸引力的方式,仅举几例。图2中的点云说明了机载遥感系统捕获的森林激光雷达数据中可以识别的细节水平。
绝大多数机载激光雷达系统基于线性激光雷达技术,其特点是高功率信号发射和用于检测回波的低灵敏度接收器。线性激光雷达基于发射的激光脉冲,波长从500nm(用于测深激光雷达)到1.5μm(用于地形激光雷达),具有一定的纳秒脉冲宽度。然后,回波返回由接收器数字化。为了区分信号返回和噪声,线性激光雷达利用单探测器接收器,需要数百或数千个光子的通量。线性激光雷达的这种特性对飞行高度、平台速度和相邻飞行线之间的横向距离施加了限制,以确保以合理的点密度输送点云。
超越线性激光雷达的限制
激光雷达技术的最新发展正在缓解这些限制。例如,盖革模式激光雷达(GM-Lidar)具有低功率信号发射和高灵敏度接收器。GM-Lidar具有较大的光束发散角,导致相当大的激光束足迹。来自封装的返回信号覆盖了2D接收器的整个视场(FOV),该接收器由盖革模式雪崩光电二极管(GmAPD)探测器阵列组成。GmAPD探测器的设计非常灵敏,因为它们可以记录单光子水平的反射能量。这些特性允许在更高的高度/飞行速度下进行数据采集,同时提供相对较高的点密度,从而降低数据采集和产品交付的成本。然而,来自载人飞行器的机载激光雷达数据可能不具备精细森林清查所需的分辨率(例如胸径、树干图和木质碎片检测)。
无人机的优缺点
与载人航空系统相比,无人飞行器(UAV)在成本低、易于部署、快速获取、能够提供高分辨率产品和更高的现场勘测频率方面具有明显的优势。无人机影像和正射影像镶嵌可用于获取一些库存特征(例如树木数量、物种、高度)。然而,由于它们有限的树冠以下测绘能力,它们仍然缺乏。无人机激光雷达具有与载人飞行器捕获的机载激光雷达相同的优势,只是空间覆盖范围减小。无人机激光雷达数据已用于分割单个树木并估计树冠覆盖率、树木高度、胸径、木质碎片体积和地上生物量。然而,对于树冠上方的飞行,无人机激光雷达绘制树冠下特征的能力受到树木密度和叶子覆盖的限制。详细的树冠下测绘——这对于准确估计关键森林生物特征(如胸径、木质碎片体积和树冠下结构)是必要的——并不总是得到保证。

地面系统的使用
地面系统,包括地面激光扫描(TLS)和地面移动激光雷达,可以捕获详细的冠层以下信息。来自TLS的高质量数据可用于在林分级别推导出森林结构指标。然而,使用红绿灯系统进行大型实地调查和数据后处理既复杂又耗时,因此有限的空间覆盖范围是常态。另一方面,地面移动系统可以在场地内机动,以获得较大的空间覆盖范围,同时减少遮挡。图1中的背包系统就是这种移动地面激光雷达的一个例子。从此类系统获得的激光雷达数据可用于树干图生成、胸径估计、树冠分割和木质碎片检测。然而,由于地形和地上物体的原因,来自地面系统的点云容易被遮挡。此外,森林地面上的障碍物会限制平台的移动。因此,使用地面移动激光雷达全面覆盖林分需要在数据采集活动期间仔细规划系统的路径。为了从地面移动激光雷达中获得有意义的点云数据,必须准确估计平台的位置和方向(即轨迹)。可以使用集成的全球导航卫星系统/惯性导航系统(GNSS/INS)直接建立轨迹估计。
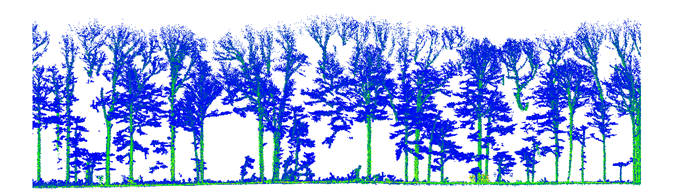
使用 GNSS/INS 进行轨迹估计的主要挑战是对 GNSS 信号的间歇性访问,这对于从机载传感器获得准确的地理参考测绘产品至关重要。对于短时间的GNSS信号中断,机载INS可以弥合这种差距,导致合理的轨迹,其质量取决于INS惯性测量单元(IMU)的等级。对于较长的GNSS信号中断,系统轨迹将导致无意义的点云(见图3)。为了缓解这种恶化,研究界一直专注于建立基于激光雷达的同步定位和映射(Lidar-SLAM)算法(见图4)。但是,仅依赖 SLAM 会产生点云数据,这些数据可能无法在全球范围内很好地进行地理配准。因此,基于SLAM的地面移动激光雷达策略在机载数据集的帮助下,将确保测绘产品的位置质量。

评估平台权衡
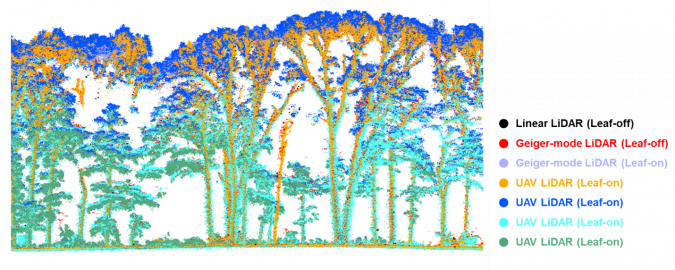
综上所述,星载、机载和地面移动激光雷达都提供冠层上方和下方的点云数据。但是,根据所使用的平台,分辨率、购置成本和覆盖区域范围之间存在权衡。例如,使用载人机载系统进行数据采集非常昂贵,并且无法以合理的时间分辨率收集数据。同时,基于无人机的激光雷达勘测具有成本效益,但无法在单棵树级别提供高分辨率的森林指标,以实现大面积覆盖。将其与静态地面激光雷达系统进行比较,后者在提供高分辨率数据的同时,会受到遮挡的影响,并且需要大量的现场工作才能覆盖小区域。相比之下,地面移动激光雷达系统只能覆盖小面积,并遭受GNSS信号中断的影响,这会影响衍生产品的质量。图 5 显示了不同平台捕获的同一棵树的激光雷达点云,导致从此类数据中可以识别出不同程度的细节。
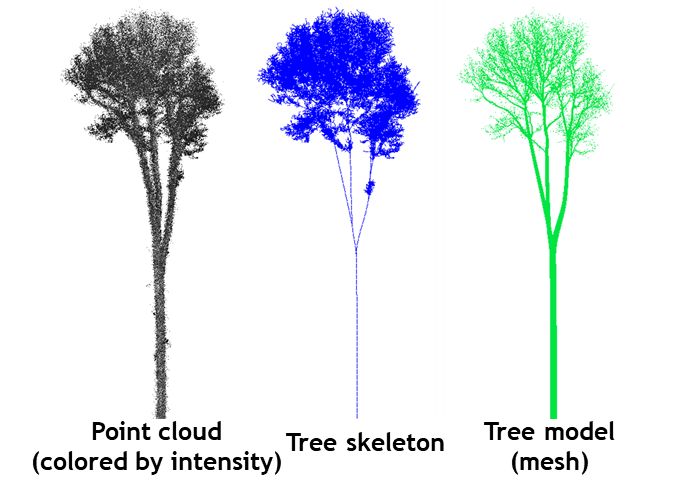
只有通过星载、机载和地面平台的有效融合,才能解决这些挑战。例如,可以使用精细的地面移动激光雷达数据开发机器学习策略。然后可以扩大这些策略以处理机载和星载数据集。只有通过确保这些多比例/平台/时态数据集的地理配准质量,才能实现这种扩展(图 6)。确保地理配准质量和开发高效的数据处理算法允许派生点云,以便对单个树进行精细表示(即数字孪生),如图 7 所示。尽管激光雷达数据可以为精细的清查提供高水平的细节,但在为树种识别和森林健康分析提供必要的光谱信息方面仍然缺乏。在这方面,高光谱成像和多光谱激光雷达技术的最新发展将非常有价值。