六轴机器人matlab工作空间分析
1.原理
将机器人工作空间转化为相应关节的随机概率模型,通过随机取值,使机器人的各个关节在其取值范围内离散化。
2.matlab程序
模型在之前博客已给出。
clear;
clc;
%建立机器人模型
% theta d a alpha offset
ML1=Link([0 0 0 0 0 ],'modified');
ML2=Link([0 0 0.180 -pi/2 0 ],'modified');
ML3=Link([0 0 0.600 0 0 ],'modified');
ML4=Link([0 0.630 0.130 -pi/2 0 ],'modified');
ML5=Link([0 0 0 pi/2 0 ],'modified');
ML6=Link([0 0 0 -pi/2 0 ],'modified');
modrobot=SerialLink([ML1 ML2 ML3 ML4 ML5 ML6],'name','modified');
modrobot.plot([0,0,0,0,0,0]);
hold on;
N=30000; %随机次数
theta1=-165/180*pi+(165/180*pi+165/180*pi)*rand(N,1); %关节1限制
theta2=-90/180*pi+(155/180*pi+90/180*pi)*rand(N,1); %关节2限制
theta3=-200/180*pi+(70/180*pi+200/180*pi)*rand(N,1); %关节3限制
theta4=-170/180*pi+(170/180*pi+170/180*pi)*rand(N,1); %关节4限制
theta5=-135/180*pi+(135/180*pi+135/180*pi)*rand(N,1); %关节5限制
theta6=-360/180*pi+(360/180*pi+360/180*pi)*rand(N,1); %关节6限制
for n=1:1:30000
modmyt06=mymodfkine(theta1(n),theta2(n),theta3(n),theta4(n),theta5(n),theta6(n));
plot3(modmyt06(1,4),modmyt06(2,4),modmyt06(3,4),'b.','MarkerSize',0.5);
end
3.运行结果
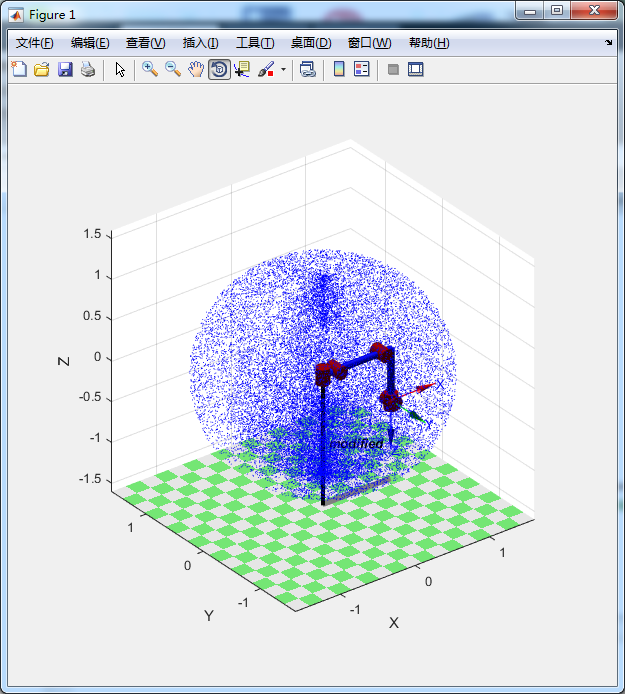
PS:本方法虽然简单,但计算量大,且工作空间的空腔、凹凸难以明显看出,需对边界做进一步处理。
转载自:https://blog.csdn.net/jldemanman/article/details/80911704