GIS 会在无人驾驶汽车的世界中蓬勃发展吗?
无人驾驶汽车通过将收集到的数百万个传感器返回(每秒约 27,000 个光点)叠加到极其精确的 3D 地图中来观察世界。
对于汽车所做的每一次运动,它都会根据该点云数据在地理空间中的位置进行计算。
GIS 技术融入无人驾驶汽车新领域的潜力有多大?
反之亦然,GIS 如何从无人驾驶汽车的世界中获益?
使用 LiDAR 和 SLAM 感知其环境

首先,让我们了解一下无人驾驶汽车的大脑。对于汽车的每一次运动,它都会使用 LiDAR、雷达、摄像头和位置估计器,它们会不断进行 360° 扫描。结合SLAM(同步定位和映射) ,汽车可以根据传感器输入实时定位周围环境。这种观点远远优于人类所能看到的。
尽管人类可以轻松感知周围环境,但对于计算机而言,这是一项极其困难的挑战。例如,人类可以识别行人、交通信号灯和人行横道。此外,人类可以通过简单的手势来预测骑车人和警察的动作。
这就是无人驾驶汽车使用安装在车辆上的 360° LiDAR 传感器的原因,它可以提供周围环境的完整视角。随着点云数据不断输入机器学习 (ML) 算法,无人驾驶汽车开始理解嘈杂的数据。这是车辆的底层大脑,可以从道路中提取特征。
根据用于训练神经网络的标记,这决定了它检测道路上物体的能力是否成功。从本质上讲,在各种情况下接受的训练越多,它就越能更好地辨别行人和野生动物。
精确的几何高清路网图
日益增长的趋势是,由于 GPS 不可靠,无人驾驶汽车将仅使用 GPS 为车辆提供大致位置。例如,谷歌的自动驾驶汽车(Waymo)由于其设计原则不能依赖 GPS。
那么无人驾驶汽车能否在没有外部信息的情况下仅依靠传感器数据运行?换句话说,它是否需要预加载 3D 地图才能发挥全部功能?
出于安全考虑,有很多理由相信自动驾驶汽车需要准确的地图。例如,如果大雪或雨水覆盖车道标记,车辆需要路缘和车道尺寸才能倒退。
事实上, HERE Maps和TomTom等公司已经开始制作高清 (HD) 地图,描绘可行驶区域的车道标记。反过来,自动驾驶汽车使用它来准确地知道他们在哪里和前进。
适用于任何情况的动态路由
如果无人驾驶汽车想要从 A 点行驶到 B 点,它需要以下 3 个东西:

- 现有的道路网络限制了他们可以旅行的地方。
- 其中包含准确的地理编码地址,以了解它们的去向。
- 以及将您从 A 带到 B 的强大路由算法。
出于导航目的,汽车必须计算时间最优或最短路径。当道路上的情况发生变化时,他们需要动态计算辅助路径。
他们需要一个地图形式的操作环境来与传感器输入交互。毕竟,它是在后台运行的 GIS 来决定最佳路径。但有时最佳路线并不总是最短的。这是流量最少的那个。
避免交通拥堵并遵守道路规则
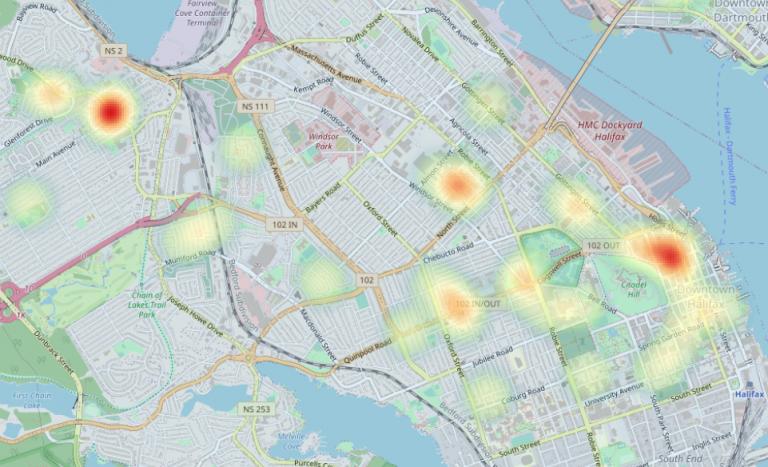
随着数以百万计的用户与Waze联系,他们在不知不觉中为社会带来了重要的好处。也就是说,他们绘制道路网络、转弯限制和交通拥堵。
与以往不同的是,HERE 地图和 Waze 等公司通过众包了解城市的交通拥堵情况。所有这些都在一张地图中,我们的日常通勤可以通过使用位置数据丰富GPS 导航系统来避免交通延误。
随着时间的推移,GIS 可以通过了解历史交通模式和实时交通数据来优化路线。对于任何给定的一天,它都可以预测预计的交通时间并改善整体驾驶员体验。
利用物联网 (IoT) 建设智慧城市

随着无人驾驶汽车开始在道路上巡逻,我们基本上有测量设备不断地构建地形图。他们非常详细地捕捉路边物体、建筑物和城市景观。智慧城市首先需要的是清点他们拥有的一切。因为我们可以获得准确的城市资产清单,这是改善基础设施协调的第一步。
随着道路上的车辆越来越多,这意味着它变得更加互联和高效。现在,我们进入物联网 (IoT)领域。只有对一辆车的感知,它总是会被动的。我们不能有任何形式的预先计划。但是,连接的车辆网络在遇到网络障碍之前是主动的。
例如,物联网将了解交通拥堵发生的位置。这不仅会传递给您的车辆,而且城市规划者也会获得改善基础设施的信息。此外,它将把地理围栏纳入您的日常生活。无论是用于安全、零售还是交付,地理围栏都会提供实时警报并提高意识。
GIS 是自动驾驶汽车引擎盖下的引擎吗?
如今,人们依靠地图将他们带到目的地。由于其固有的空间特性,自动驾驶汽车也将如此。
但是他们会扫描他们的环境并将它们覆盖在预先存在的地图上以确定去哪里。
尽管 SLAM 技术取得了进步,但目前的困境是获得精确的准确性和保持更新的地图。
由于无人驾驶汽车需要没有错误的地图,并以绝对空间精度不断更新,我们无法将它们预加载的地图与它们捕获的外部世界分离。
如果您想了解更多关于自主系统的信息,请查看 Udacity 提供的自动驾驶汽车工程师纳米学位课程。